Since the infamous space race of the 1960s, space agencies across the globe have been building, testing and launching various robots, each designed to teach us more about our atmosphere, Moon, the solar system and beyond.
From the USSR’s first lunar rover of the 1970s to the launch of the Mars rovers, these robots carry out tasks too dangerous or mundane for humans, and visit the most remote, extreme terrains of far-gone planets.
To celebrate all that we’ve learnt, and what we’re still yet to discover, we’ve rounded-up a list of the best space robots.
Lunokhod 1

In the 1970s, this robot from the Soviet Union rolled 10KM around the surface of the Moon collecting data about lunar soil and the Moon's craters.
A year after NASA’s Neil Armstrong took the first steps on the Moon, the USSR sent up the first successful robotic lunar rover – Lunokhod 1.
From November 1970 until the summer of the following year, Lunokhod 1 travelled more than 10km across the lunar surface, operated remotely from the Soviet Union.
To put this achievement into perspective, NASA’s Mars Rover Opportunity only travelled 12km in six years. Lunokhod 1 ran on solar power during the day and a polonium thermal heater at night to survive the -150°C temperatures. It sent back data about the lunar soil and some of the first close-up views of the Moon’s craters.
Apollo 15 Moon Buggy

This is the Apollo 15 moon buggy. The first vehicle to be driven on the Moon. It drove for a little over three hours while on that mission.
NASA’s first lunar rover, or moon buggy, didn’t land until Lunokhod 1 had finished its transmissions, in July 1971.
Launched as part of the manned Apollo 15 mission, the Apollo 15 moon buggy became the first vehicle to be driven on the Moon.
The beauty of the drivable rover was that it could help astronauts explore beyond their landing site, meaning they could gather much more exotic samples. And, during the mission, this particular LRV drove a total of 27km – or three hours and two minutes. Technologically, it formed the basis of every rover that has been built and launched since. In this picture, taken by Commander Dave Scott, Module Pilot Jim Irwin is pictured with the rover with Mount Hadley in the background.
Sojourner

Sojourner was the original rover to land on Mars. More would follow, but this was the first. In just two months it sent back 550 images of the red planet.
In another first, Sojourner was the original robotic rover to land on Mars. Named after Sojourner Truth, the African-American activist, the rover explored an area of the Red Planet around its landing site called Ares Vallis.
This area was flat, making it safe for the rover to land, and was thought to have been the site of an ancient flood. From its landing on 4 July 1997 until its final transmission on two months later, Sojourner sent back 550 images of Mars as well as revealing fascinating insights about the type of soil, winds and weather.
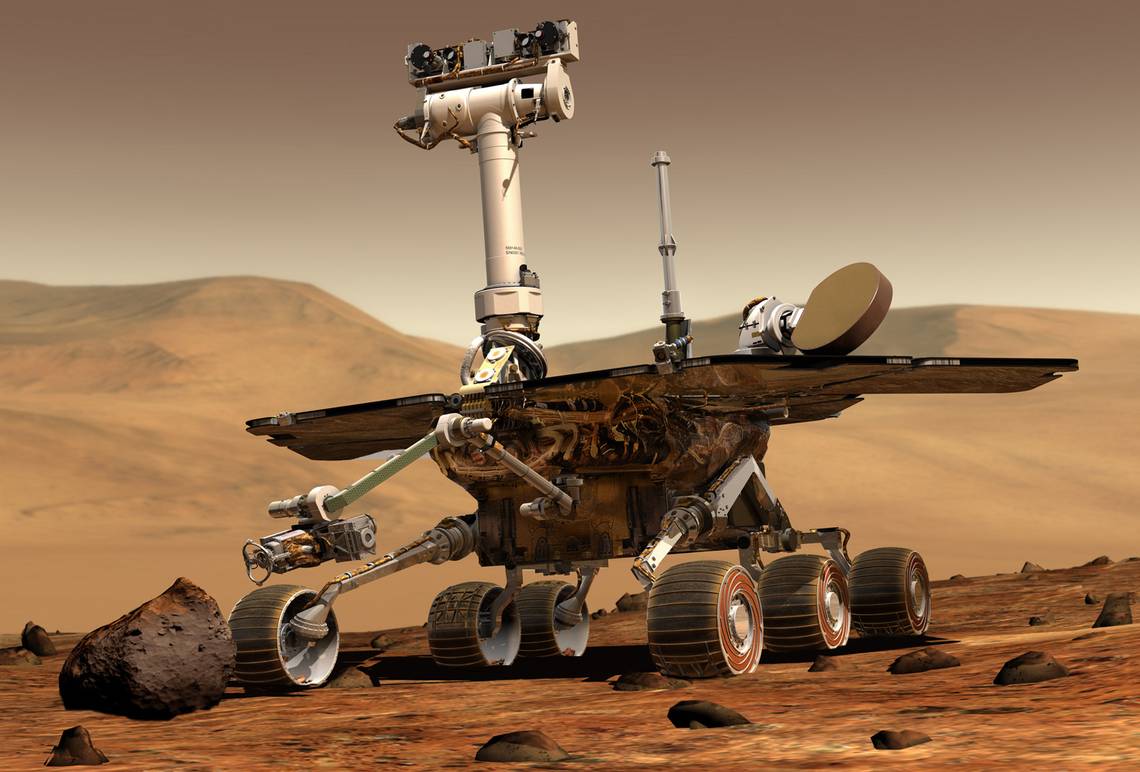
Opportunity Rover

The Opportunity rover managed to gather 217,000 images of Mars during its 15 year mission before its final transmission in 2018.
A staggering 15 years after its mission had been expected to end, the Mars Opportunity Rover made its final transmission to NASA HQ on 10 June 2018.
Opportunity landed in the Meridiani Planum region of Mars in January, 2004, 20 days after its sibling Spirit rover landed in Gusev Crater on the other side of the planet. Spirit logged almost 8 km before its mission ended in May 2011, while Opportunity racked up a record-breaking 45km.
During its travels, it collected more than 217,000 images. This selfie of Opportunity was taken while it was travelling through "Perseverance Valley" on the slopes of Endeavour Crater using the rover's Microscopic Imager on its 5000th Martian Day.
Curiosity Rover

Curiosity is the most famous of the Mars rovers. Designed to assess Mars’ "habitability” with a bank of scientific instruments to analyse the planet with.
Probably the most famous of the Mars rovers, and one that is still on active duty, is Curiosity. This selfie, pictured, shows the car-sized rover on Vera Rubin Ridge in the Gale crater on Mars.
Curiosity landed on Mars on 6 August, 2012 and was initially commissioned for two years. Just six months after landing, NASA extended this mission “indefinitely”.
It was built to assess Mars’ "habitability” and it carries the largest, most advanced suite of scientific instruments ever sent to the martian surface. These instruments can take rock samples, analyse their formation and structure and send the data back to Earth.
Dextre

An unusual addition to our list, this is a space robot that was built to assist with maintenance of the International Space Station.
A little closer to home is Dextre – a two-armed “telemanipulator” space robot built by the Canadian Space Agency (CSA) to help out on the International Space Station (ISS). It completed its first scheduled task in February 2011 and has been assisting the onboard astronauts with maintenance of the station.
In particular, Dextre tackles the tough, routine jobs that need to be done both inside and outside the station and is pictured here on the outside of the ISS replacing one of the exterior cameras. It is controlled from Earth by the CSA, which frees the astronauts onboard to spend more time on science experiments. Each of its arms has seven joints that can move up and down, side to side, and can rotate. Each hand then contains a wrench, camera and lights and a connector to provide power, data and video connection.
Robonaut

Robonauts are are dexterous humanoid robots that are able to carry our dangerous or repetitive tasks need to keep the International Space Station in orbit.
Elsewhere on the ISS, the Robonaut project has been conducting research into robotics technology by sending a humanoid to “live” alongside the Station’s current crew.
NASA astronaut Dan Burbank, who was commander during expedition 30, is pictured with Robonaut 2 in the Destiny Laboratory of the ISS.
Robonauts are are dexterous humanoid robots built at NASA’s Johnson Space Center in Houston, Texas. The original model was recently upgraded with two “legs”, more capable processors and sensors and the so-called Robonaut 2 has been tasked with working through the checkout exercises needed to keep the ISS in orbit. These tasks include those that are simple, repetitive or dangerous.
Athlete

This is the All-Terrain Hex-Legged Extra-Terrestrial Explorer. A bot that's built to be capable fo walking over the rough terrains of Mars, the Moon and more.
Athlete has been built and is being tested by NASA’s Jet Propulsion Laboratory.
Its name stands for All-Terrain Hex-Legged Extra-Terrestrial Explorer and it’s a robotic vehicle capable of rolling over and walking through the kinds of terrains seen on the Moon, Mars and beyond.
It is designed to help robotic and manned missions, transport and deposit payloads. This first version can dock with refuelling stations, for example, and future versions will be able to connect to even more spacecraft as well as move 100 times faster than the Mars Exploration Rovers and travel over almost any terrain, including vertical rock faces.
Mars 2020 Perseverance rover

The Perseverance looks similar to Curiosity but is more capable and even has a drill to enable it to collect rock samples.
All of the Mars rovers that have come before have been building up to the next major Mars mission. On 30 July 2020, the next Mars rover launched into space, setting off on its mission on the surface of the Red planet.
The Perseverance looks similar to Curiosity yet comes with a more capable wheel design as well as a drill that will be used for coring samples from Martian rocks and soil. This robot is about 10 feet long, nine feet wide and seven feet tall. Onboard it sports all manner of tech including 23 different cameras for navigating Mars and surveying its environment.
This is the first time a Mars rover has contained such a drill and this will help NASA scientists greater understand Mars’ terrain, topography and history.
Ingenuity Mars Helicopter

Ingenuity is interesting as it's technically going to be the first vehicle to fly on another planet.
This is the Ingenuity Mars Helicopter, a tiny little helicopter that has been sent to Mars along with the Perseverance rover. It's a small machine that will weigh half of what it does on Earth when it's on Mars. Ingenuity is interesting as it's technically going to be the first vehicle to fly on another planet.
Flying on Mars will also be a challenge as the atmosphere there is 99 per cent less dense than it is here on Earth. Which means it needs to be light and the rotors need to spin much, much faster than a helicopter on Earth. It'll also have to survive harsh climates too, with the temperatures dropping to minus 130 degrees Fahrenheit (minus 90 degrees Celsius) overnight.
Ingenuity can only fly for 90 seconds at a time and uses solar panels to recharge during the day to fly again the next day. It will also need to fly mostly autonomously as it would take too long for control signals to reach Mars from Earth. Any commands need to be sent in advance and the helicopter will fly itself to waypoints
Astrobees

Astrobees are "free-flying" robotic systems that are built to help alleviate the workload of astronauts aboard the International Space Station.
While some of the robots on this list are on different planets carrying out awesome tasks, some are just helping out with day-to-day missions.
Astrobees are "free-flying" robotic systems that are built to help alleviate the workload of astronauts aboard the International Space Station. They help by functioning autonomously or by remote control and completing tasks such as inventory, documenting experiments and more.
They can even get around themselves with electric fans that can propel them around the station and a mix of cameras and sensors to help them see.
Vyommitra aka Space Friend

From India comes a spacefaring humanoid robot that's been designed to look like a female and is intended to be part of an experimental uncrewed mission.
From India comes a spacefaring humanoid robot that's been designed to look like a female and is intended to be part of an experimental uncrewed mission.
The Indian Space Research Organisation intends to use Vyommitra as a way to have a better understand of the impacts of weightlessness and radiation on the human body over long periods of time.
It can perform some tasks including controlling life support and is able to recognise and engage with humans as well as mimicking them.